Boston Dynamics is known for the flashy videos of its robots doing impressive feats.
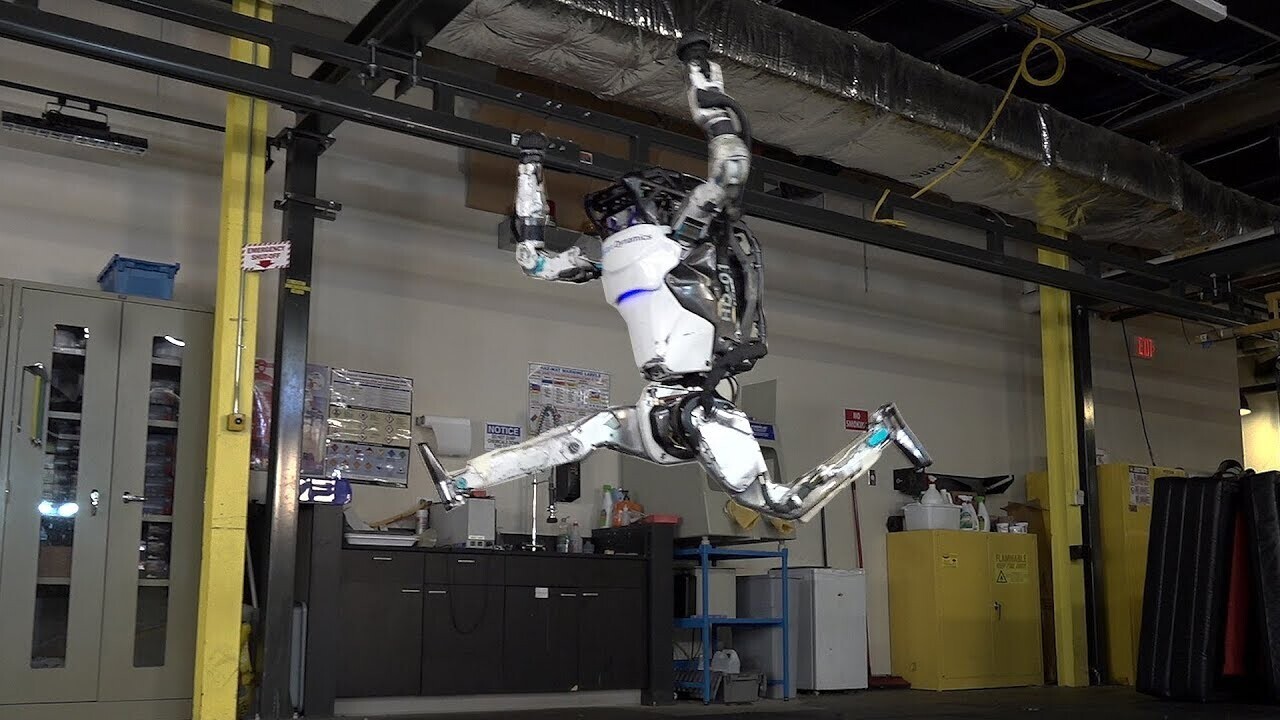
And the robotics companys latest video, which shows Atlas successfully running a parkour track, is no exception.
The video and an accompanyingblog postprovide some very important insights into the challenges of creating humanoid robots.
Research vs commercial robots
Officially, Boston Dynamics is a for-profit organization.
The company wants to commercialize its technology and sell products.
It’s free, every week, in your inbox.

Atlas, on the other hand, is not one among Boston Dynamics commercial projects.
The company describes it as a research platform.
This is not because humanoid biped robots are not commercially useful.

We humans have designed our homes, cities, factories, offices, and objects to accommodate our physique.
or require their environments to be changed to accommodate their limits.
However, biped robots are also really hard to create.
The challenges of biped robots
In animals and humans, growth andlearning happens together.
But growing robots is impossible (at least for the foreseeable future).
The evolution of Atlas has been nothing short of impressive.
But the robot still struggles with some very basic skills seen in all primates.
We learn these skills long before we start running on narrow ledges or jumping on platforms.
Simulation vs real-world training
One of the key challenges of robotics is physical-world experience.
The Atlas video displays this very well.
A team of engineers must regularly repair Atlas after it gets damaged.
This cycle drives up costs and slows down training.
Training robots in the physical also has a scale problem.
Of course, the research team could slash training time by using multiple prototypes in parallel on separate tracks.
But this would significantly increase the costs and would need huge investments in gear and real estate.
An alternative to real-world training is simulated learning.
But virtual worlds are just an approximation of the real world.
The Atlas video shows several such cases.
One notable example takes place when Atlas reaches a barrier and its arm to vault over it.
This is a simple routine that doesnt require great physical strength.
But although Atlas manages the feat, its arm shakes awkwardly.
The robot also has a heavy torso and comparatively weak arm joints.
These kinds of details are hard to simulate and need real-world testing.
Perception in robots
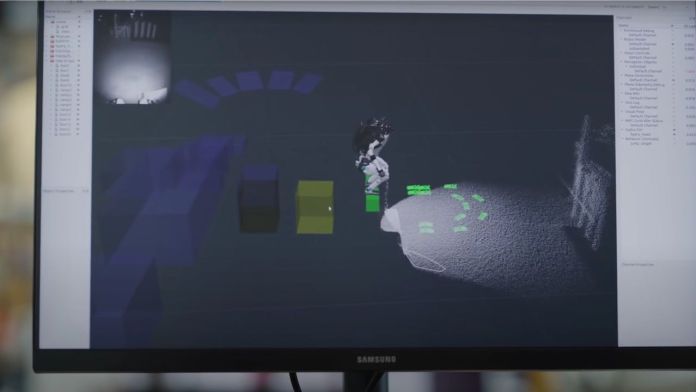
According to Boston Dynamics, Atlas uses perception to navigate the world.
The companyswebsitestates that Atlas uses depth sensors to generate point clouds of the environment and detect its surroundings.
This is similar to thetechnology used in self-driving carsto detect roads, objects, and people in their surroundings.
This is another shortcut that the AI community has been taking.
Human vision doesnt rely on depth sensors.
Atlas still has a long way to go.
But were still in the early days of creating that future.
I hope that demonstrations like this provide a small glimpse of whats possible.
you could read the original articlehere.
