Scientists have tappedneuromorphic computingto keeprobotslearning about new objects after theyve been deployed.
IntelLabs has developed one of the most notable architectures in the field: theLoihineuromorphic chip.
It’s free, every week, in your inbox.
Intel Labs this week unveiled another app.
The new neuromorphic approach aims to overcomes these limitations.
The researchers first implemented an SNN on Loihi.

This architecturelocalizes learning to a single layer of plastic synapses.
It also accounts for different views of objects by adding new neurons on demand.
As a result, the learning process unfolds autonomously while interacting with the user.
Neuromorphic simulations
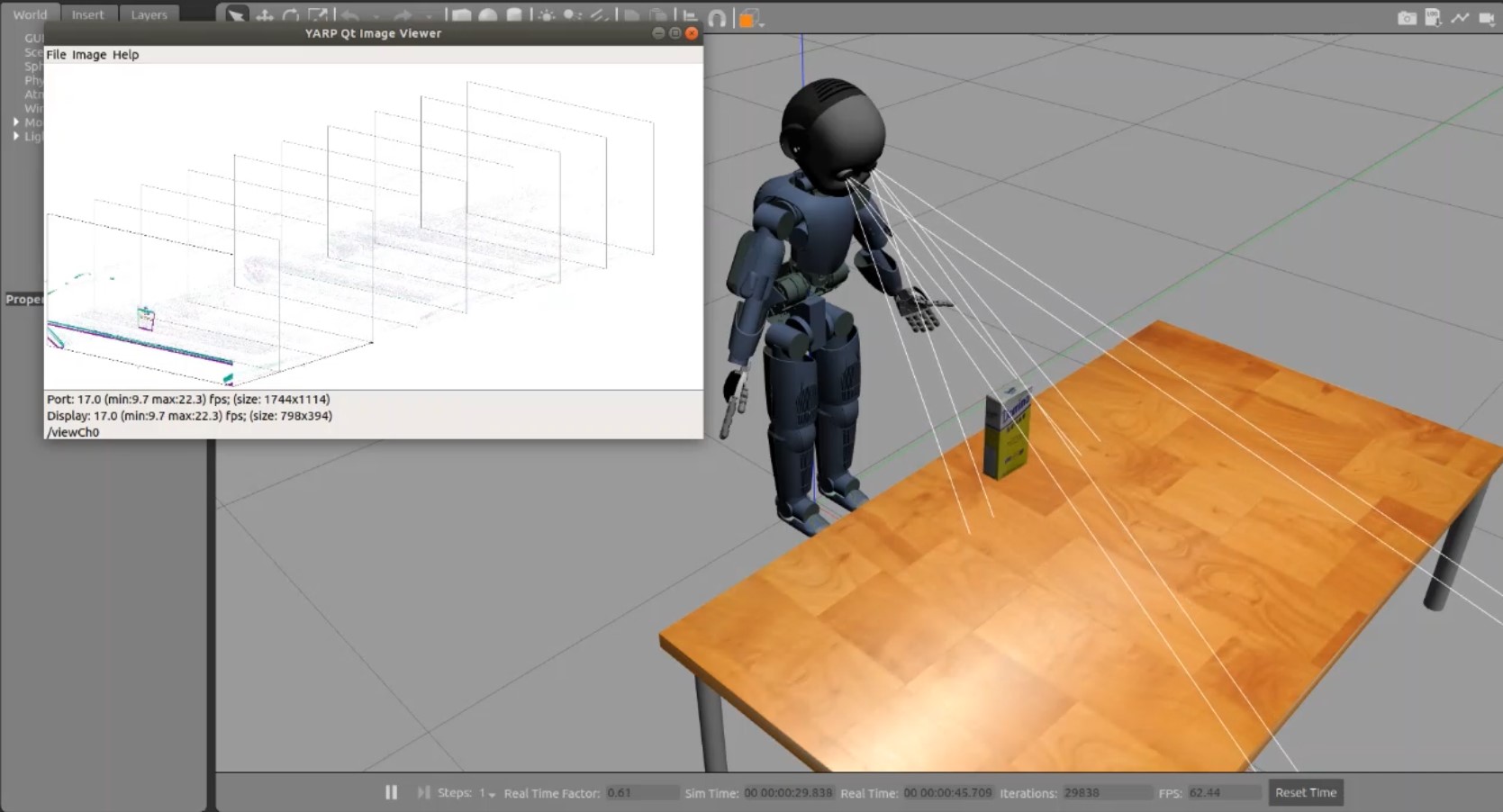
The team tested their approach in a simulated 3D environment.
In this setup, therobot actively senses objects by moving an event-based camera that functions as its eyes.
The cameras sensor sees objects in a manner inspired by small fixational eye movements called microsaccades.
If the object it views is new, the SNN representation is learned or updated.
If the object is known, the web connection recognizes it and provides feedback to the user.
They now need to test their algorithm in the real-world with actual robots.
Story byThomas Macaulay
Thomas is the managing editor of TNW.
He leads our coverage of European tech and oversees our talented team of writers.
Away from work, he e(show all)Thomas is the managing editor of TNW.
He leads our coverage of European tech and oversees our talented team of writers.
Away from work, he enjoys playing chess (badly) and the guitar (even worse).
